麻省理工学院的研究人员已经展示了微型无人机,它们能够以昆虫般的敏捷和弹性四处飞奔,最终可以执行一些特定任务。推动这些微型机器人的软性致动器非常耐用,但它们需要比类似尺寸的刚性致动器高得多的电压。
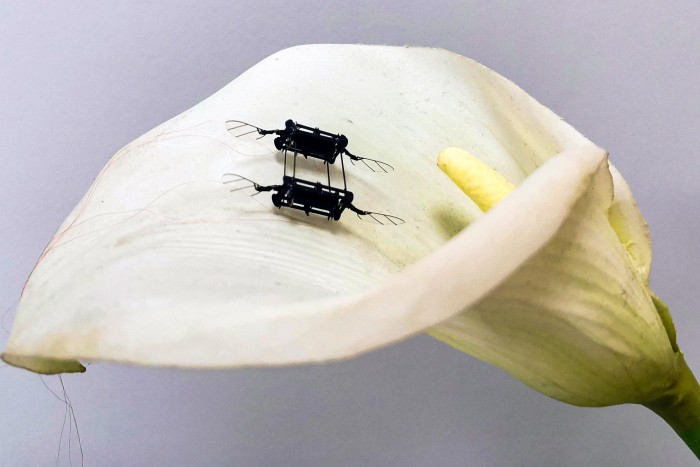
现在麻省理工学院研究人员开创了一种新的制造技术,使他们能够为空中微型机器人生产低电压、高功率密度、高耐久性的软驱动器。这种制造技术产生了低电压、功率密集的人工肌肉,提高了飞行微型机器人的性能。其工作电压比目前的版本低75%,同时携带的有效载荷多80%。这些软驱动器就像人工肌肉一样,可以快速地扇动机器人的翅膀。
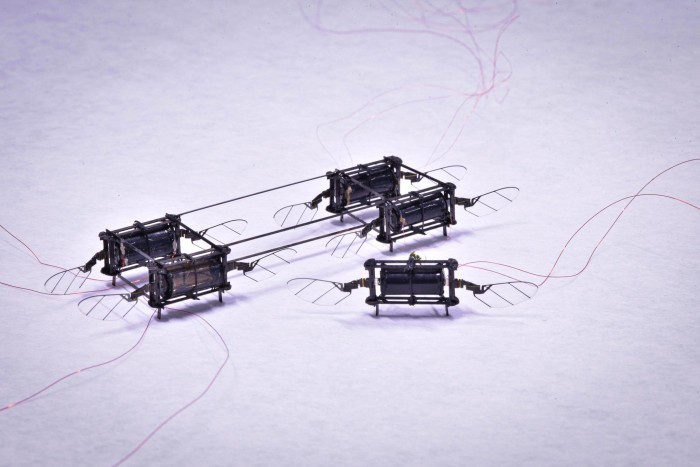
这种新的制造技术生产的人工肌肉缺陷较少,这大大延长了部件的寿命,并增加了机器人的性能和有效载荷。这为在未来过渡到在微型机器人上安装电力电子装置开辟了很多机会。这种长方形的微型机器人,重量不到四分之一,有四组翅膀,每组翅膀都由一个软驱动器驱动。
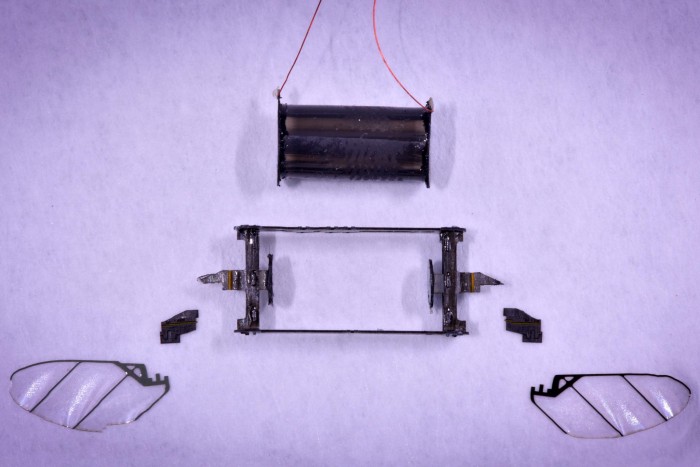
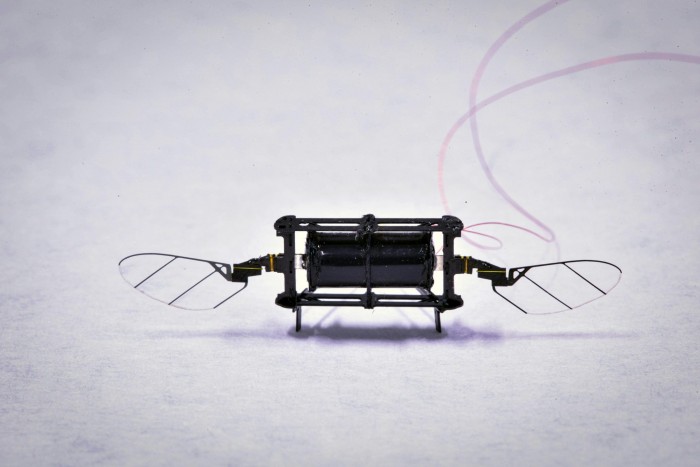
这些类似肌肉的致动器是由两层弹性材料制成的,它们被夹在两个非常薄的电极之间,然后被卷成一个柔软的圆柱体。当电压被施加到致动器上时,电极挤压弹性体,而这种机械应变被用来扇动机翼。执行器的表面积越大,需要的电压就越少。
因此,研究团队通过交替使用尽可能多的超薄弹性体和电极来构建这些人工肌肉。随着弹性体层越来越薄,它们变得更加不稳定。研究人员首次能够制造出一个有20层的致动器,每层的厚度为10微米(约为一个红细胞的直径)。但他们不得不重新发明部分制造工艺来达到这一目的。
版权及免责声明:凡本网所属版权作品,转载时须获得授权并注明来源“物联之家 - 物联观察新视角,国内领先科技门户”,违者本网将保留追究其相关法律责任的权力。凡转载文章,不代表本网观点和立场。
延伸阅读



 机器人和AI助力澳大利亚落地首个“全自动免人工”农场
机器人和AI助力澳大利亚落地首个“全自动免人工”农场
 华南地区第一条全自动运行线路,南宁地铁 5 号线正式开通试运营
华南地区第一条全自动运行线路,南宁地铁 5 号线正式开通试运营
版权所有:物联之家 - 物联观察新视角,国内领先科技门户