编者按:
为推进车联网产业发展,特邀请业内专家学者共同建言献策,推出“车联网百家谈”系列。作为本系列第一期,周玉山博士和欧先国先生提出从生物演化角度看自动驾驶发展路径,“L0-L5仅表达了当前主流的人-车维度分级方式,我们还可以引入道路、网络、法规等因素,形成更为复杂的方案配比,提供更多的路线选择”,“L5不是自动驾驶唯一最佳的终极目标”,未来只要能演化成功的自动驾驶路径都应该是合理的,比如“20%人,30%车,50%路”,而不是盲目追求最聪明的车。期待通过作者独特的视角和观点,带给读者不一样的启发。
前言
近年来,随着人工智能技术的突飞猛进,自动驾驶在各种场景中也得到了越来越广泛的应用。然而,安全事故的频发和商业模式的缺失,让人们不得不重新思考一系列问题:相关技术是否已经满足大规模应用的要求?“人和车”、“车和路”、“无人车和有人车”,“技术和规则”……种种交通要素应当如何联结?各种运营模式是否存在最优的组合方案?
本文尝试从生物演化的角度对自动驾驶发展路径进行探讨,希望为业内人士提供自动驾驶技术和模式发展的另一种思路。
01
技术发展的“渐进式”特征
“渐进”是生物演化的一大特征。从最初的单细胞生物体,到今天种类繁多的各种生物,演化过程有着清晰连续的化石痕迹。比如鸟类翅膀的演化,虽然现代鸟类的翅膀形态和其先祖恐龙的爪子外观大相径庭,但骨骼构造基本一致,而且可以看出明显的沿袭关系。


技术的发展是否也是逐渐变化的?技术发展在一定程度上是“设计”的结果,呈现“阶梯式”变化的性质,似乎并不完全是渐变式发展。
然而在基础理论没有突破性发展的前提下,特别是在某一个技术体系框架之内,由于各种条件的限制,人们通常只能在前人的研究基础上进行改良式创新。
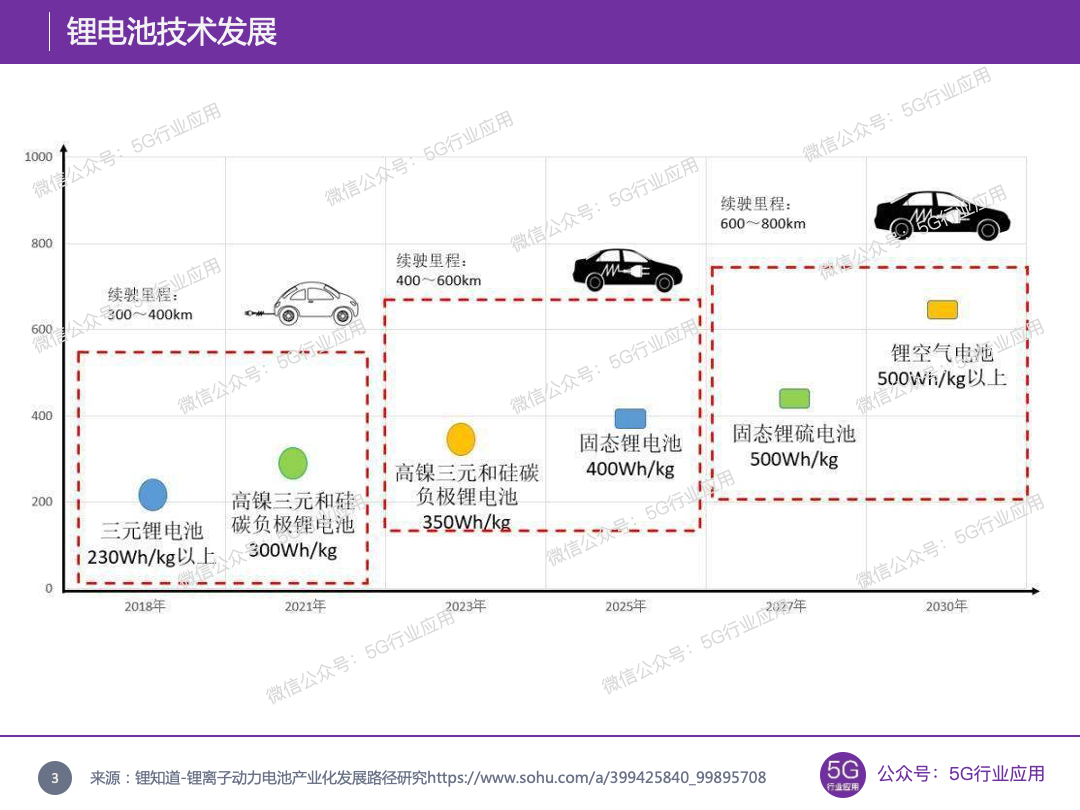
因此,在同一个“台阶水平”上,技术演变基本呈现“渐进式”发展的特征。以锂电池为例,其内在化学体系提出至今,材料构成、机械结构以及各方面性能的变化,都遵循“逐渐发生”的变化逻辑,本质上没有明显的颠覆性突变。
因此,也许可以借用演化论的思想,对技术发展路径进行一定的梳理和分析。
02
自动驾驶分级和生物的进化
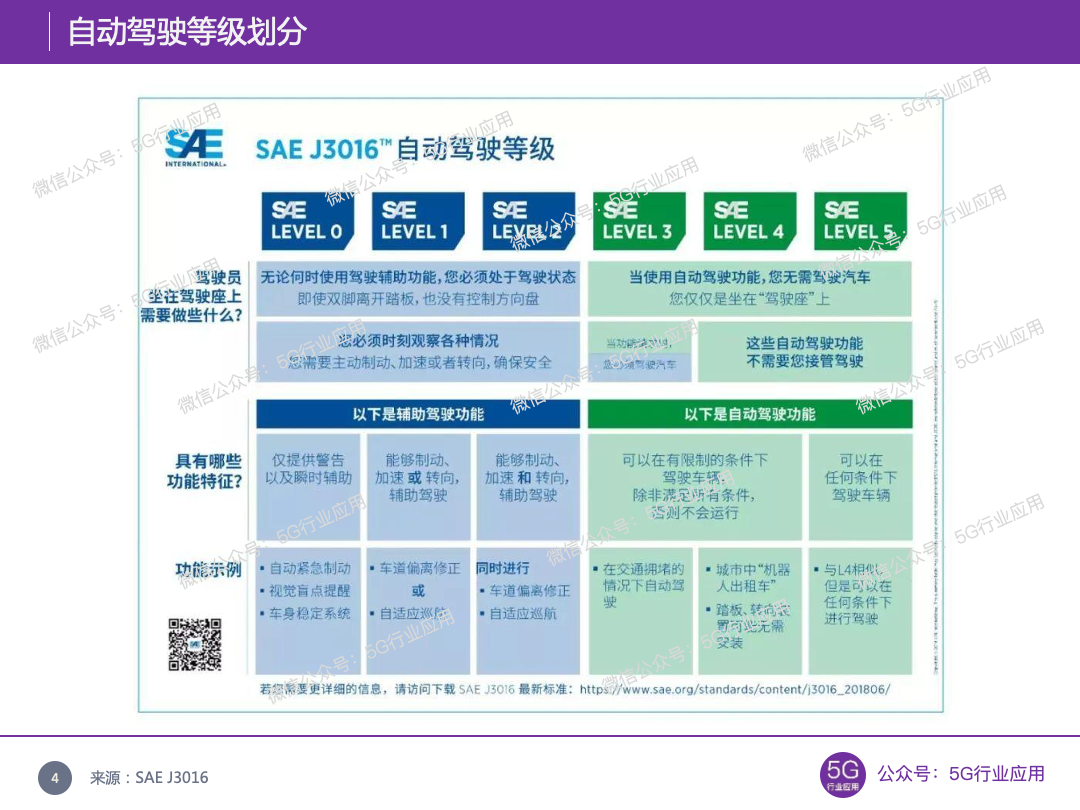
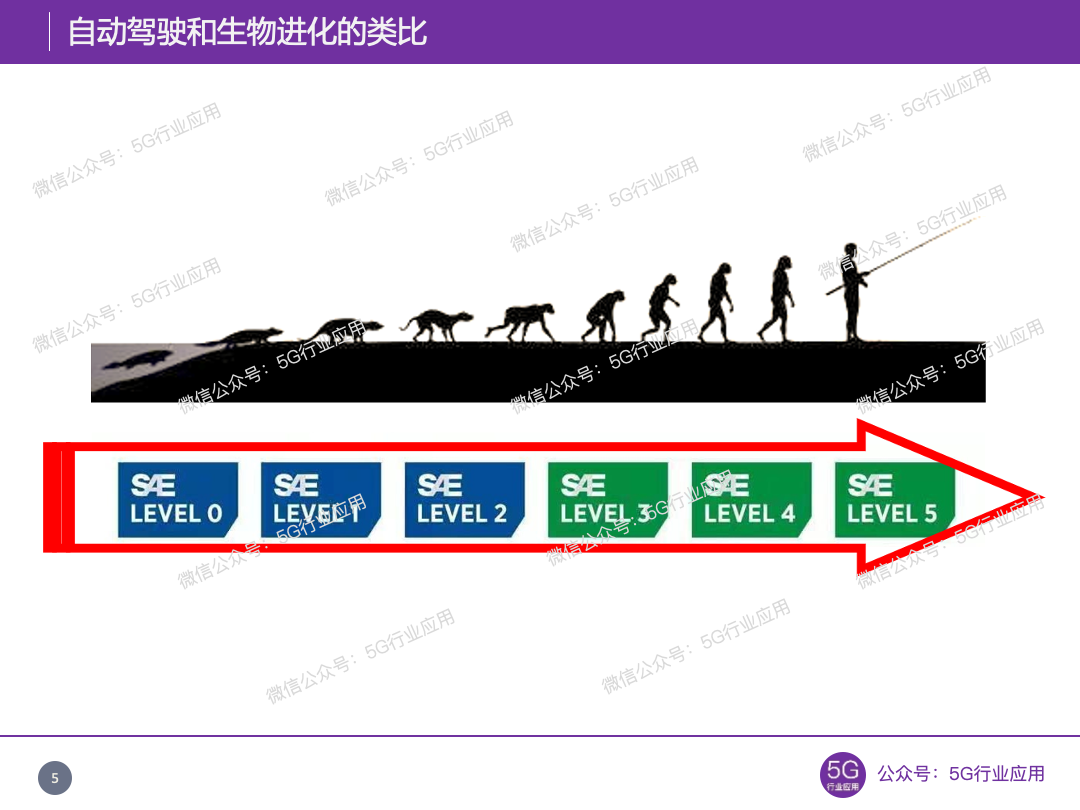
对于自动驾驶的发展,最广为人知的是SAE J3016的等级划分方式。这一分级标准明显有着逐步演进的特征,很容易令人联想到生物的进化。
自动驾驶的“进化”逻辑。这种“类似生物的进化”的联想,会带来两点强烈的暗示:
暗示一:L5级别的完全自动驾驶,是自动驾驶的终极状态。各种技术的发展,都是为了实现这一目标;
暗示二:自动驾驶技术是从L0至L5,逐步连续发展变化的。
假如以上暗示成立,可以推出几点逻辑悖论:
悖论一:L3 级自动驾驶难以推广。一方面,“逐步发展”意味着L3是不可跨越的必经阶段;另一方面,L3又要求驾驶员在没有任何操作的同时,始终保持注意力集中在路面上,随时准备接管车辆,这种状况是难以长时间持续的;
悖论二:车联网和车路协同相关研究工作都将成为“过渡状态”。作为终极目标的L5,要求车辆能够在任何条件下自动驾驶,意味着未来的场景是能够完全脱离网络支持。换言之,网络和外界支持终将退出系统;
悖论三:安全员的产品导向问题。由于当前大部分地区的法规要求,自动驾驶车辆必须配备安全员。而安全员的存在,必然会对车辆软硬件设置及技术路线的选择产生影响。在这样的情况下,一旦法规允许取消安全员,车辆将难以 “逐渐演化”为完全无人的技术状态。
03
“不可逆”的进化路径
让我们暂时放下以上悖论,看看进化论如何分析这些问题:上文所述的两点暗示,从进化论的角度,可以类比为以下两个命题:
命题一:人类是进化的顶峰,是进化的终极状态;
命题二:生物大致沿着鱼类-两栖类-爬行类-低等哺乳类-灵长类-人类的路径演化。
人类是否进化的顶峰?在讨论这一命题之前,首先要厘清“顶峰”的评判标准。进化的评判标准只有一个——生存能力。活下来的,就是成功者。以这一标准来评价,人类在恶劣的自然环境面前的生存能力,其实远远不如低等动物如蟑螂、老鼠。不用说和更低等的单细胞生物相比了。

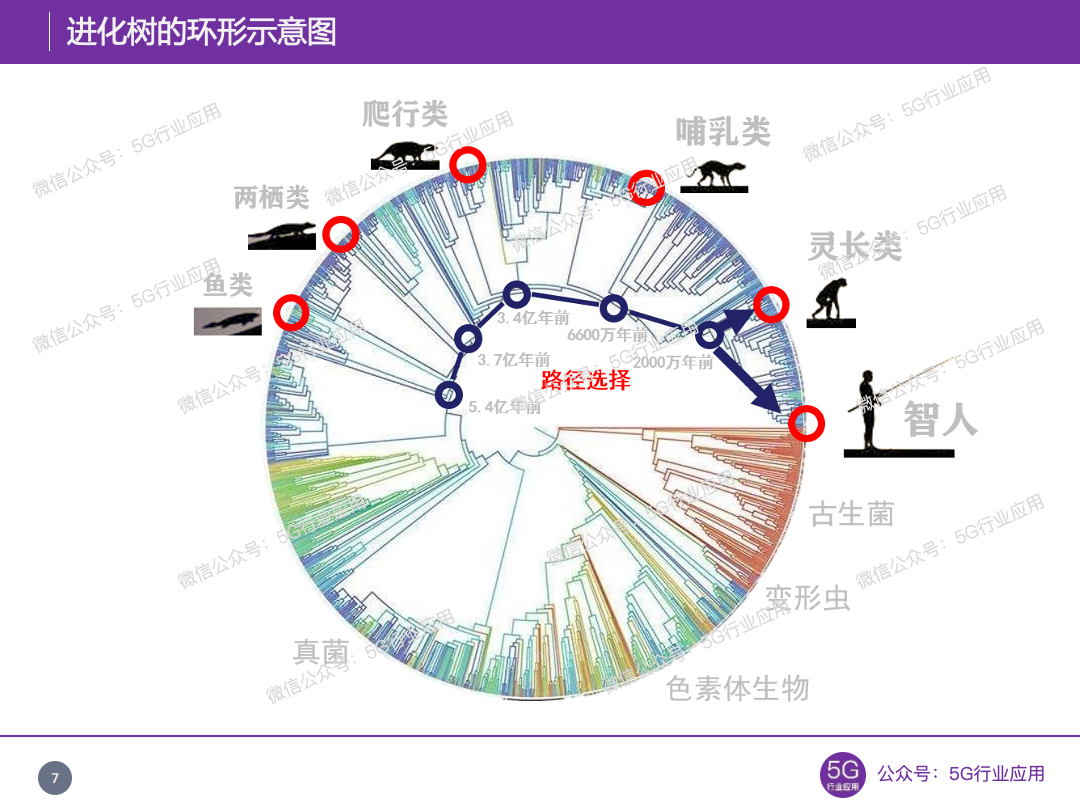
人类的演化路径人类是不是沿着鱼类-两栖类……灵长类的路径逐渐演化而来的?换句话说,人是不是从猴子变来的?下图是进化树的环形示意图,图中圆环中心代表物种的起源,越接近圆周的物种,代表年代越晚。
我们今天所能看到物种,都被标注在圆环边缘之上。可以清晰的看到,从5.4亿年前原始的鱼类进化到今天的人类,进化树产生了多次分支(生殖隔离),进化路径经历了多次选择。
目前多数考古学家认为,距今1000-2000万年前,东非大裂谷地区的森林古猿,在地壳强烈运动造成的气候和地形剧变之下,完成了最为关键的一次路径选择。他们从森林走向稀树草原,下到地面生活,开始直立行走,从而逐步演化成为今天的智人。
可以说人是从猴子变来的,但“猴子”不是今天的猴子,而是2000万年前的“猴子”。我们今天看到的猴子,在2000万年前已经走上了一条和人类完全不同的岔路,不可能再演化成为人类了。结合以上两点分析,可以得出以下观点:
观点一:“适者皆王”,生存到今天的物种,都是演化的成功者。只有路径选择不同,没有高低优劣之分;
观点二:路径选择至关重要,不同的选择导致不同的结果。选择是不可逆的,一旦选择完成便不可更改。
04
自动驾驶演化论
自动驾驶分级标准的重新认知类比生物演化过程,对自动驾驶分级进行分析,同样需要一个关键要素——评判标准。2019年9月,中共中央、国务院印发的《交通强国建设纲要》提出了明确的指标:“构建安全、便捷、高效、绿色、经济的现代化综合交通体系”。
自动驾驶是为交通运输服务的,是否满足安全、便捷、高效、绿色、经济的要求(以下简称“核心目标”),应该成为判断自动驾驶技术以及应用效果优劣的最高指标。因此,对自动驾驶分级,更为合理的解读应该是这样的:
解读一:L0-L5是发展路线的选择,数字只是代号,没有优劣之分。L5不是唯一最佳的终极目标;
解读二:选择了某一条发展路径之后,技术及应用应当向着更好地满足“核心目标”的要求发展,而不仅仅以L5为目标。
“自动驾驶演化树”参照环形进化树,可以作出“自动驾驶演化树”的示意图如下。
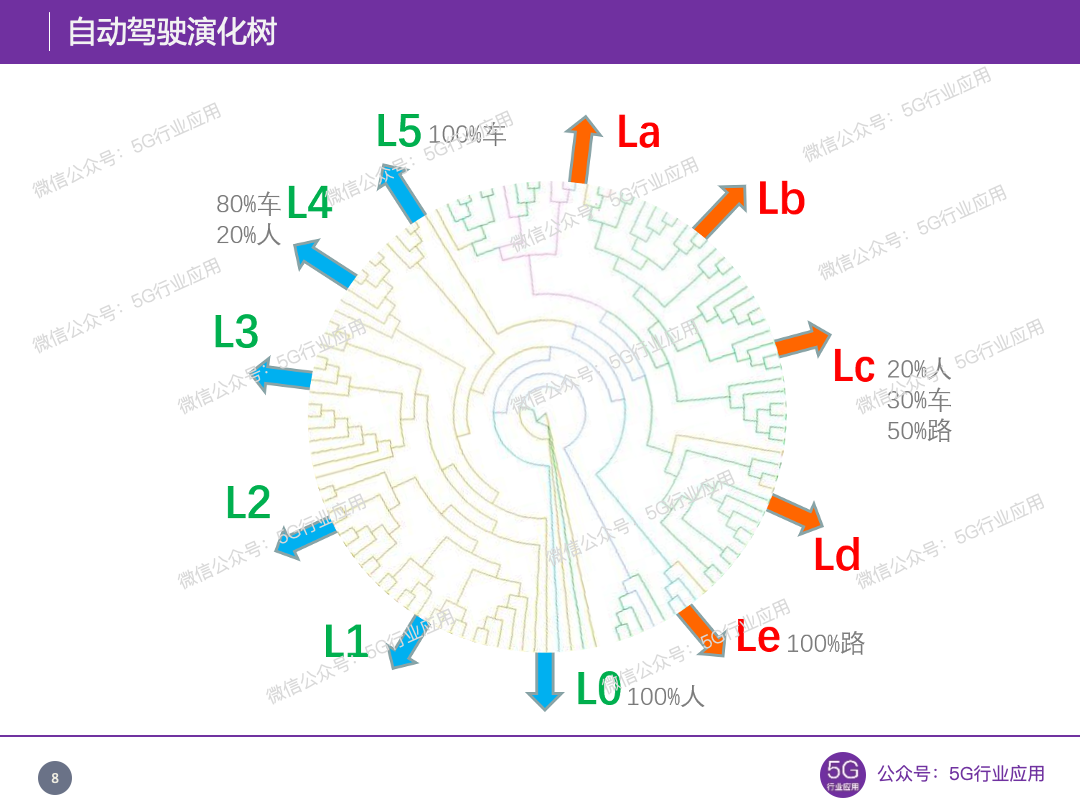
越接近圆周的方案,能够越好地满足“核心目标”的要求。图中L0-L5代表“人”和“车”对车辆驾驶的权重配比。例如,选择了L4方案,意味着将以80%车、20%人的权重配比进行技术开发和应用模式探索。
随着技术的发展,最终产品应越来越好地满足“核心目标”的要求。在整个开发过程中,人和车的权重应保持基本稳定。值得注意的是,图中的L0-L5,仅表达了当前主流的 “人-车维度”的分级方式。
我们还可以引入道路、网络、法规等因素,形成更为复杂的方案配比,提供更多的路线选择。如图中La-Le所示的其他各种方案。综上所述,在现有技术条件下,如何选择合理发展路径,在人、车、路、网、法规等要素之间寻求最佳结合点,应当成为自动驾驶下一阶段发展的重要研究课题。
05
后记
自动驾驶作为未来交通出行中的一项关键技术组合,是复杂系统中的重要组成部分。任何对其抽象化、简单化的描述,都难以囊括所有内涵。
本文观点并非独辟蹊径,实际上,当前一些大型车企发布的自动驾驶白皮书中关于发展路径选择的论述,以及部分车企“跳过L3,直接进行L4开发”的战略”,都隐含了类似的思路。
本文尝试从演化论角度进行思考,试图对自动驾驶整体发展进行相对系统的梳理,希望业界同仁避免落入“唯技术化”、盲目追求“最聪明的车”的牛角尖中。技术的发展有其自身规律。遵循规律,顺势而为,当可水到渠成。
本文经5G行业应用授权转载。
版权及免责声明:凡本网所属版权作品,转载时须获得授权并注明来源“物联之家 - 物联观察新视角,国内领先科技门户”,违者本网将保留追究其相关法律责任的权力。凡转载文章,不代表本网观点和立场。
延伸阅读


 全球芯片短缺到什么时候?至少延续到明年
全球芯片短缺到什么时候?至少延续到明年
 5G时代,个人信息安全如何守护?
5G时代,个人信息安全如何守护?
版权所有:物联之家 - 物联观察新视角,国内领先科技门户